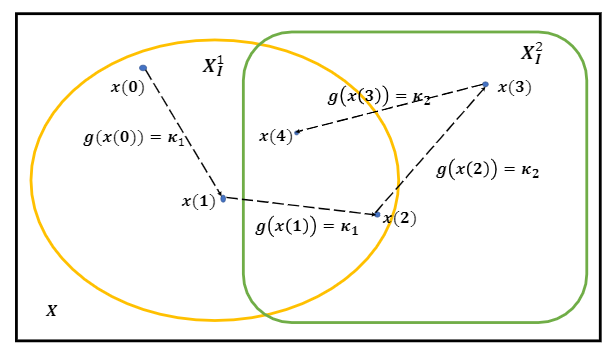
Neural networks have been increasingly applied for control in learning-enabled cyber-physical systems (LE-CPSs) and demonstrated great promises in improving system performance and efficiency, as well as reducing the need for complex physical models. However, the lack of safety guarantees for such neural network based controllers has significantly impeded their adoption in safety-critical CPSs. In this work, we propose a controller adaptation approach that automatically switches among multiple controllers, including neural network controllers, to guarantee system safety and improve energy efficiency. Our approach includes two key components based on formal methods and machine learning. First, we approximate each controller with a Bernstein-polynomial based hybrid system model under bounded disturbance, and compute a safe invariant set for each controller based on its corresponding hybrid system. Intuitively, the invariant set of a controller defines the state space where the system can always remain safe under its control. The union of the controllers' invariants sets then define a safe adaptation space that is larger than (or equal to) that of each controller. Second, we develop a deep reinforcement learning method to learn a controller switching strategy for reducing the control/actuation energy cost, while with the help of a safety guard rule, ensuring that the system stays within the safe space.
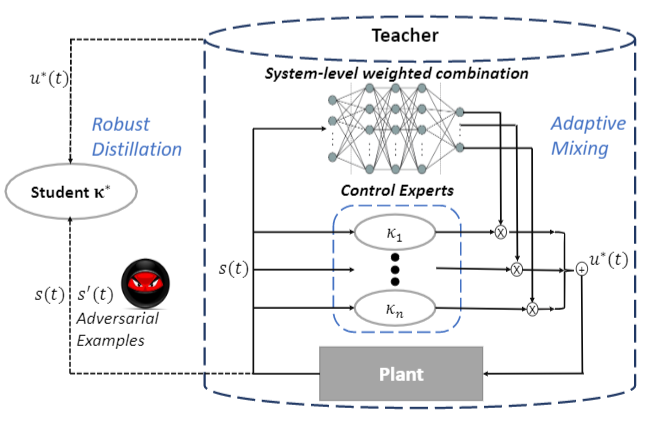
Neural networks are being increasingly applied to control and decision making for learning-enabled cyber-physical systems (LE-CPSs). They have shown promising performance without requiring the development of complex physical models; however, their adoption is significantly hindered by the concerns on their safety, robustness, and efficiency. In this work, we propose cocktail, a novel design framework that automatically learns a neural network based controller from multiple existing control methods (experts) that could be either model-based or neural network based. In particular, cocktail first performs reinforcement learning to learn an optimal system-level adaptive mixing strategy that incorporates the underlying experts with dynamically-assigned weights, and then conducts a teacher-student distillation with probabilistic adversarial training and regularization to synthesize a student neural network controller with improved control robustness (measured by a safe control rate metric with respect to adversarial attacks or measurement noises), control energy efficiency, and verifiability (measured by the computation time for verification). Experiments on three non-linear systems demonstrate significant advantages of our approach on these properties over various baseline methods.
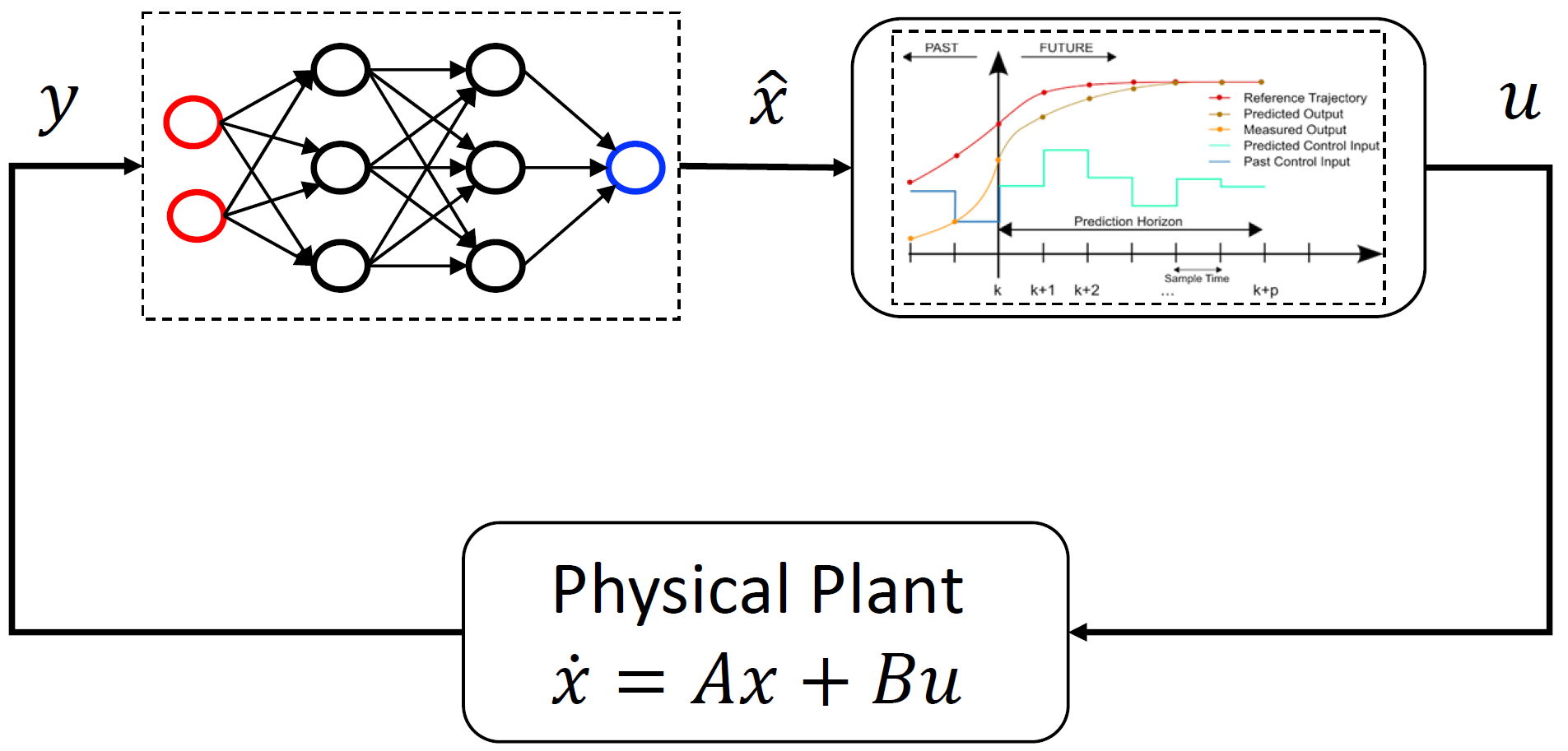
Future autonomous systems will rely on advanced sensors and deep neural networks for perceiving the environment, and then utilize the perceived information for system planning, control, adaptation, and general decision making. However, due to the inherent uncertainties from the dynamic environment and the lack of methodologies for predicting neural network behavior, the perception modules in autonomous systems often could not provide deterministic guarantees and may sometimes lead the system into unsafe states (e.g., as evident by a number of high-profile accidents with experimental autonomous vehicles). This has significantly impeded the broader application of machine learning techniques, particularly those based on deep neural networks, in safety-critical systems. We leverage formal methods that quantitatively bound the output uncertainty of perception neural networks with respect to input perturbations, to formally ensure the safety of system control. Unlike most existing works that only focus on either the perception module or the control module, our approach provides a holistic end-to-end framework that bounds the perception uncertainty and addresses its impact on control.
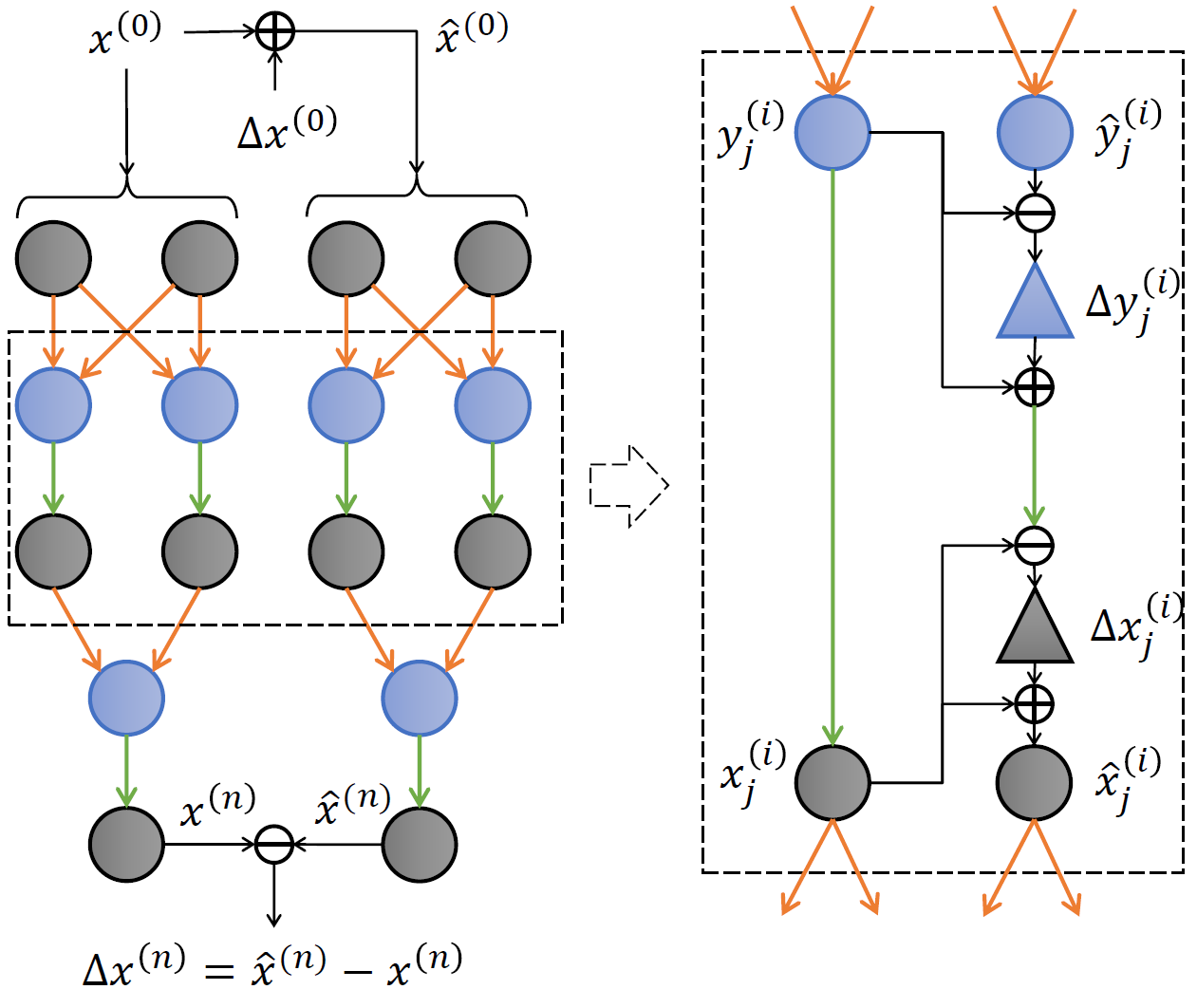
The robustness of deep neural networks has received significant interest recently, especially when being deployed in safety-critical systems, as it is important to analyze how sensitive the model output is under input perturbations. While most previous works focused on the local robustness property around an input sample, the studies of the global robustness property, which bounds the maximum output change under perturbations over the entire input space, are still lacking. In this work, we formulate the global robustness certification for neural networks with ReLU activation functions as a mixed-integer linear programming (MILP) problem, and present an efficient approach to address it. Our approach includes a novel interleaving twin-network encoding scheme, where two copies of the neural network are encoded side-by-side with extra interleaving dependencies added between them, and an over-approximation algorithm leveraging relaxation and refinement techniques to reduce complexity. Experiments demonstrate the timing efficiency of our work when compared with previous global robustness certification methods and the tightness of our over-approximation. A case study of closed-loop control safety verification is conducted, and demonstrates the importance and practicality of our approach for certifying the global robustness of neural networks in safety-critical systems.