we present a new methodology based on the weakly-hard paradigm for setting the sampling periods of control tasks by leveraging the scheduling flexibility in the architecture layer to improve the system performance at the function layer. We focus on theoretical control stability analysis at the function layer and task schedulability at the architecture layer. We consider control performance via simulation and propose an approach to analyze the control stability of the controller under the given deadline miss pattern. The results of these works demonstrate the importance and effectiveness of cross-layer design for automotive systems.
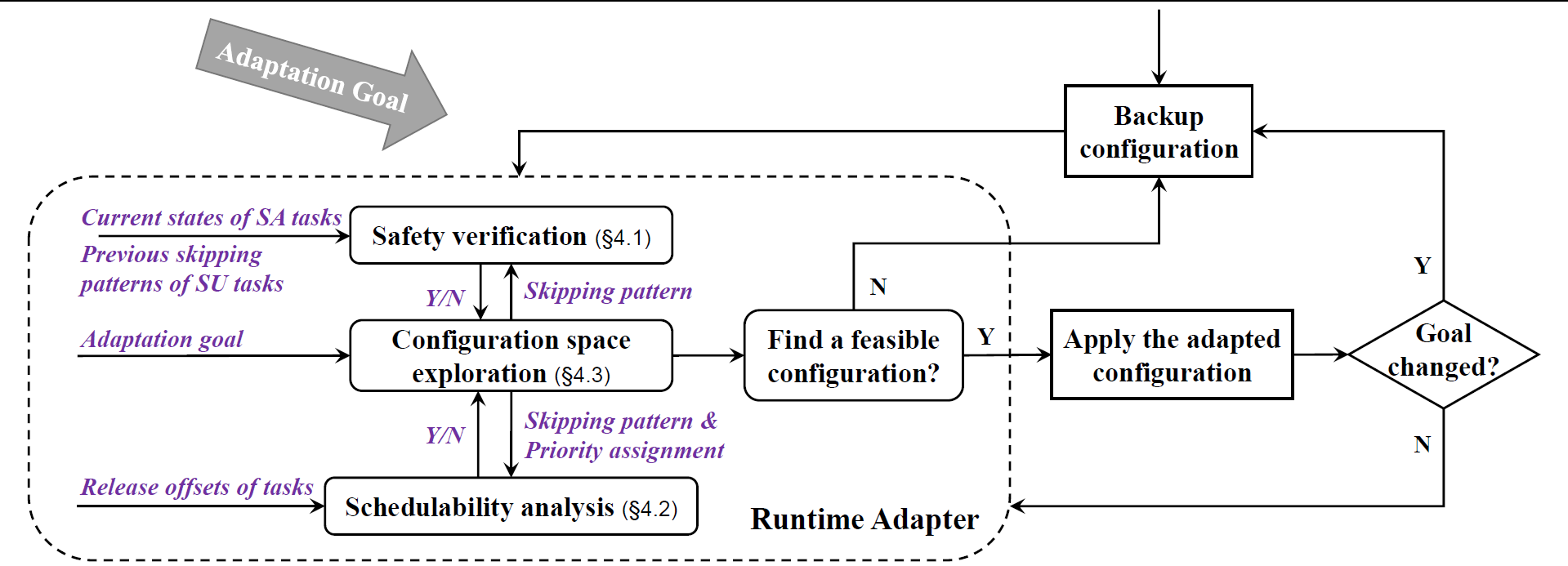
During the operation of many real-time safety-critical systems, there are often strong needs for adapting to a dynamic environment or evolving mission objectives, e.g., increasing sampling and control frequencies of some functions to improve their performance under certain situations. However, a system's ability to adapt is often limited by tight resource constraints and rigid periodic execution requirements. In this work, we present a cross-layer approach to improve system adaptability by allowing proactive skipping of task executions, so that the resources can be either saved directly or re-allocated to other tasks for their performance improvement. Our approach includes three novel elements: 1) formal methods for deriving the feasible skipping choices of control tasks with safety guarantees at the functional layer, 2) a schedulability analysis method for assessing system feasibility at the architectural layer under allowed task job skippings, and 3) a runtime adaptation algorithm that efficiently explores job skipping choices and task priorities for meeting system adaptation requirements while ensuring system safety and timing correctness. Experiments demonstrate the effectiveness of our approach in meeting system adaptation needs.